Toyota CH-R Revue Technique: Description Du Systeme
DESCRIPTION DU SYSTEME
DESCRIPTION SUCCINCTE
(a) Le rÃĐseau local de commande (CAN) est un systÃĻme de communication de donnÃĐes sÃĐrielle pour application en temps rÃĐel. C'est un systÃĻme de communication multiplex pour vÃĐhicule dotÃĐ d'une vitesse de communication ÃĐlevÃĐe et d'une fonction de dÃĐtection des dysfonctionnements.
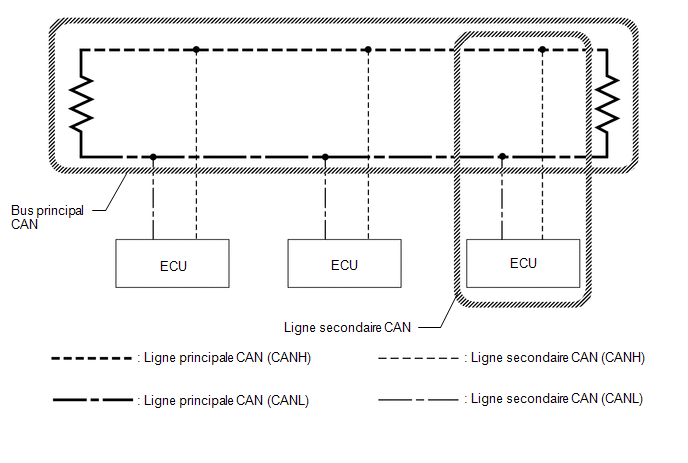
(b) En utilisant les lignes de bus CANH et CANL de paire, la communication CAN est ÃĐtablie à l'aide d'une tension diffÃĐrentielle. (Une tension de rÃĐfÃĐrence est appliquÃĐe à la paire de lignes et une tension diffÃĐrentielle est crÃĐÃĐe lors de la communication).
(c) De nombreux capteurs ou ECU ÃĐquipant le vÃĐhicule fonctionnent en partageant des informations et en communiquant entre eux.
(d) 2 rÃĐsistances qui sont nÃĐcessaires pour la communication sont utilisÃĐes dans une ligne principale de bus CAN.
DEFINITION DES TERMES
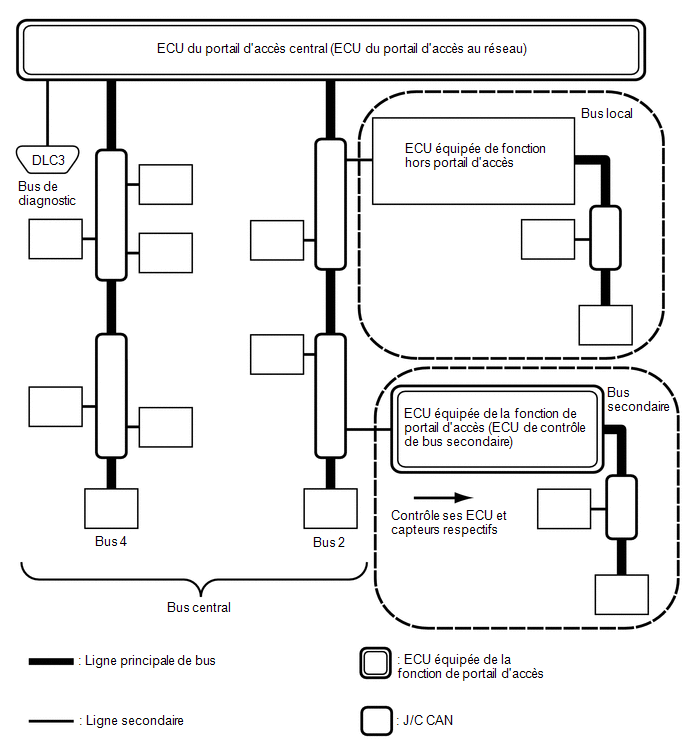
(a) Bus central
(1) Le bus central est un terme utilisÃĐ pour dÃĐcrire tous les bus directement connectÃĐs à l'ECU du portail d'accÃĻs central (ECU du portail d'accÃĻs au rÃĐseau).
CONSEIL:
Un bus s'affiche en tant que bus sur l'ÃĐcran "Communication Bus Check" du Techstream.
(b) Bus secondaire
(1) Un bus secondaire est un bus qui dispose d'une fonction de portail d'accÃĻs ÃĐquipÃĐ d'ECU afin de communiquer avec le bus central et les autres bus secondaires.
CONSEIL:
- Un bus secondaire s'affiche en tant que bus secondaire sur l'ÃĐcran "Communication Bus Check" du Techstream.
- Lorsque le bus secondaire est sÃĐlectionnÃĐ sur l'ÃĐcran "Communication Bus Check", les ECU et les capteurs branchÃĐs sur des rÃĐseaux autres que CAN comme les rÃĐseaux LIN peuvent ÃĐgalement s'afficher en plus des ECU et des capteurs branchÃĐs sur les bus secondaires du rÃĐseau CAN.
(c) Bus local
(1) Un bus local est un bus qui ne peut pas communiquer avec d'autres bus. Les ECU et les capteurs sur un bus local communiquent uniquement avec les autres ECU et capteurs dans le mÊme bus.
(d) CAN J/C
(1) Un connecteur de jonction CAN est un connecteur qui permet de raccorder les lignes secondaires sur un bus principal.
(e) Bus principal
(1) Une ligne de bus principal est le faisceau de cÃĒbles qui relie les 2 rÃĐsistances d'extrÃĐmitÃĐ d'un bus.
(f) Secondaire
(1) Une ligne de bus secondaire est un faisceau de cÃĒbles qui connecte l'ECU et le capteur à une ligne de bus principal.
(g) RÃĐsistances d'extrÃĐmitÃĐ
(1) Les rÃĐsistances d'extrÃĐmitÃĐ maintenant un signal stable dans le bus CAN sont posÃĐes. 2 rÃĐsistances de 120 ÎĐ situÃĐes à chaque extrÃĐmitÃĐ du bus sont nÃĐcessaires.
 Mesures De Precaution
Mesures De Precaution
MESURES DE PRECAUTION
EXPRESSIONS RELATIVES AU CONTACTEUR D'ALLUMAGE
(a) Le type de contacteur d'allumage utilisÃĐ varie en fonction des caractÃĐristiques
du vÃĐhicule. Les expressions rep ...
 Schema Du Systeme
Schema Du Systeme
SCHEMA DU SYSTEME
(a) Le systÃĻme de communication CAN se compose de 5 bus.
*A
avec systÃĻme de contrÃīle d'angle mort
-
-
...
Autres matÃĐriaux::
Toyota CH-R Revue Technique > Systeme De Navigation: Comment Utiliser La Recherche De Pannes
MESURE DE PRECAUTION / REMARQUE / CONSEIL
CONSEIL:
Suivre la procÃĐdure suivante pour effectuer la recherche de pannes du
systÃĻme de navigation.
*: Utiliser le Techstream.
PROCEDURE
1.
VEHICULE AMENE A L'ATELIER
SU ...
Toyota CH-R Revue Technique > Systeme Audio Et Video (pour Type à RÃĐcepteur De Radio): Circuit d'ÃĐclairage
DESCRIPTION
L'alimentation ÃĐlectrique est fournie à l'ÃĐclairage de l'ensemble de rÃĐcepteur
de radio et de contacteur au volant lorsque le contacteur de commande d'ÃĐclairage
est en position Tail ou Head.
SCHEMA DE CABLAGE
MESURE DE PRECAUTION / REMARQUE / CONSEIL
REM ...
Toyota C-HR (AX20) 2023-2025 Notice d'utilisation
Toyota CH-R Notice d'utilisation
- Index illustrÃĐ
- SÃĐcuritÃĐ routiÃĻre et antivol
- CombinÃĐ d'instruments
- Utilisation de chaque ÃĐquipement
- Conduite
Toyota CH-R Revue Technique
0.0078