Toyota CH-R Revue Technique: Bornes De L'ecu
BORNES DE L'ECU
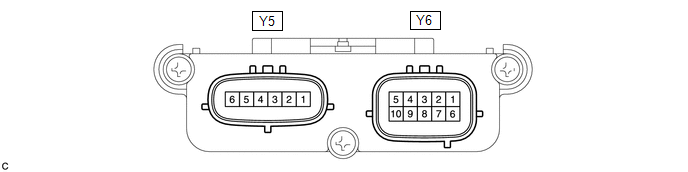
ECU DE DETECTION D'OCCUPANT
|
N° de borne (symbole) |
Couleur du cÃĒblage |
Description de la borne |
Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|---|---|
|
Y5-1 (SVC1) - Y5-5 (SGD1) |
R - G |
Avant dans le sous-ensemble d'alimentation ÃĐlectrique du capteur de dÃĐtection de charge |
Contacteur d'allumage en position ON |
11 Ã 14 V |
|
Y5-2 (SVC3) - Y5-6 (SGD3) |
GR - W |
DÃĐtection de charge sur le sous-ensemble de capteur arriÃĻre de l'alimentation ÃĐlectrique |
Contacteur d'allumage en position ON |
11 Ã 14 V |
|
Y5-3 (SIG1) - Y5-5 (SGD1) |
P - G |
Avant de signal du sous-ensemble de capteur de dÃĐtection de charge |
Contacteur d'allumage en position ON |
GÃĐnÃĐration d'impulsions |
|
Y5-4 (SIG3) - Y5-6 (SGD3) |
SB - W |
Sous-ensemble de capteur arriÃĻre de signal de dÃĐtection de charge |
Contacteur d'allumage en position ON |
GÃĐnÃĐration d'impulsions |
|
Y5-5 (SGD1) - Y6-10 (GND) |
G - W-B |
Avant de masse du sous-ensemble de capteur de dÃĐtection de charge |
En permanence |
En dessous de 1 V |
|
Y5-6 (SGD3) - Y6-10 (GND) |
W - W-B |
Sous-ensemble de capteur arriÃĻre de dÃĐtection de charge sur la masse |
En permanence |
En dessous de 1 V |
|
Y6-4 (CANL) - Y6-10 (GND) |
SB - W-B |
Ligne de communication CAN |
Contacteur d'allumage en position ON |
GÃĐnÃĐration d'impulsions |
|
Y6-5 (CANH) - Y6-10 (GND) |
R - W-B |
Ligne de communication CAN |
Contacteur d'allumage en position ON |
GÃĐnÃĐration d'impulsions |
|
Y6-6 (IG2) - Y6-10 (GND) |
B - W-B |
Source d'alimentation ÃĐlectrique |
Contacteur d'allumage en position ON |
11 Ã 14 V |
|
Y6-7 (BSW) - Y6-9 (BGND) |
G - P |
Signal du contacteur de boucle cÃītÃĐ passager |
En permanence |
GÃĐnÃĐration d'impulsions |
|
Y6-9 (BGND) - Y6-10 (GND) |
P - W-B |
Masse de contacteur de boucle de ceinture de sÃĐcuritÃĐ cÃītÃĐ passager |
En permanence |
En dessous de 1 V |
|
Y6-10 (GND) - Masse de carrosserie |
W-B - Masse de carrosserie |
Masse |
En permanence |
En dessous de 1 V |
 Initialisation
Initialisation
INITIALISATION
DESCRIPTION
(a) Les capteurs du point zÃĐro de classification d'occupant peuvent dÃĐvier dans
les cas suivants. Pour assurer la prÃĐcision de capteur, veiller à effectuer le ca ...
 Systeme De Diagnostic
Systeme De Diagnostic
SYSTEME DE DIAGNOSTIC
VERIFIER DLC3
(a) VÃĐrifier DLC3.
Cliquer ici
FONCTION DU TEMOIN ON/OFF D'AIRBAG DU PASSAGER
(a) VÃĐrification initiale
(1) Mettre le contacteur d'allumage en pos ...
Autres matÃĐriaux::
Toyota CH-R Revue Technique > Entretien: Flexible De Frein Arriere
Pieces Constitutives
PIECES CONSTITUTIVES
SCHEMA
*1
FLEXIBLE ARRIERE
*2
JOINT D'ETANCHEITE
*3
BOULON-RACCORD
-
-
Couple de serrage pour "zones principales concernan ...
Toyota CH-R Revue Technique > Systeme De Climatisation (pour SystÃĻme De Climatisation Automatique Avec Capteur
De Pression De Climatisation PosÃĐ Sur Le CÃītÃĐ): Description Du Systeme
DESCRIPTION DU SYSTEME
GENERALITES
Le systÃĻme de climatisation est ÃĐquipÃĐ des commandes suivantes:
Commande
Description gÃĐnÃĐrale
Commande de rÃĐseau neuronal
Cette commande peut effectuer un contrÃīle complexe en simulant artificiellement
...
Toyota C-HR (AX20) 2023-2025 Notice d'utilisation
Toyota CH-R Notice d'utilisation
- Index illustrÃĐ
- SÃĐcuritÃĐ routiÃĻre et antivol
- CombinÃĐ d'instruments
- Utilisation de chaque ÃĐquipement
- Conduite
Toyota CH-R Revue Technique
0.0086